slides
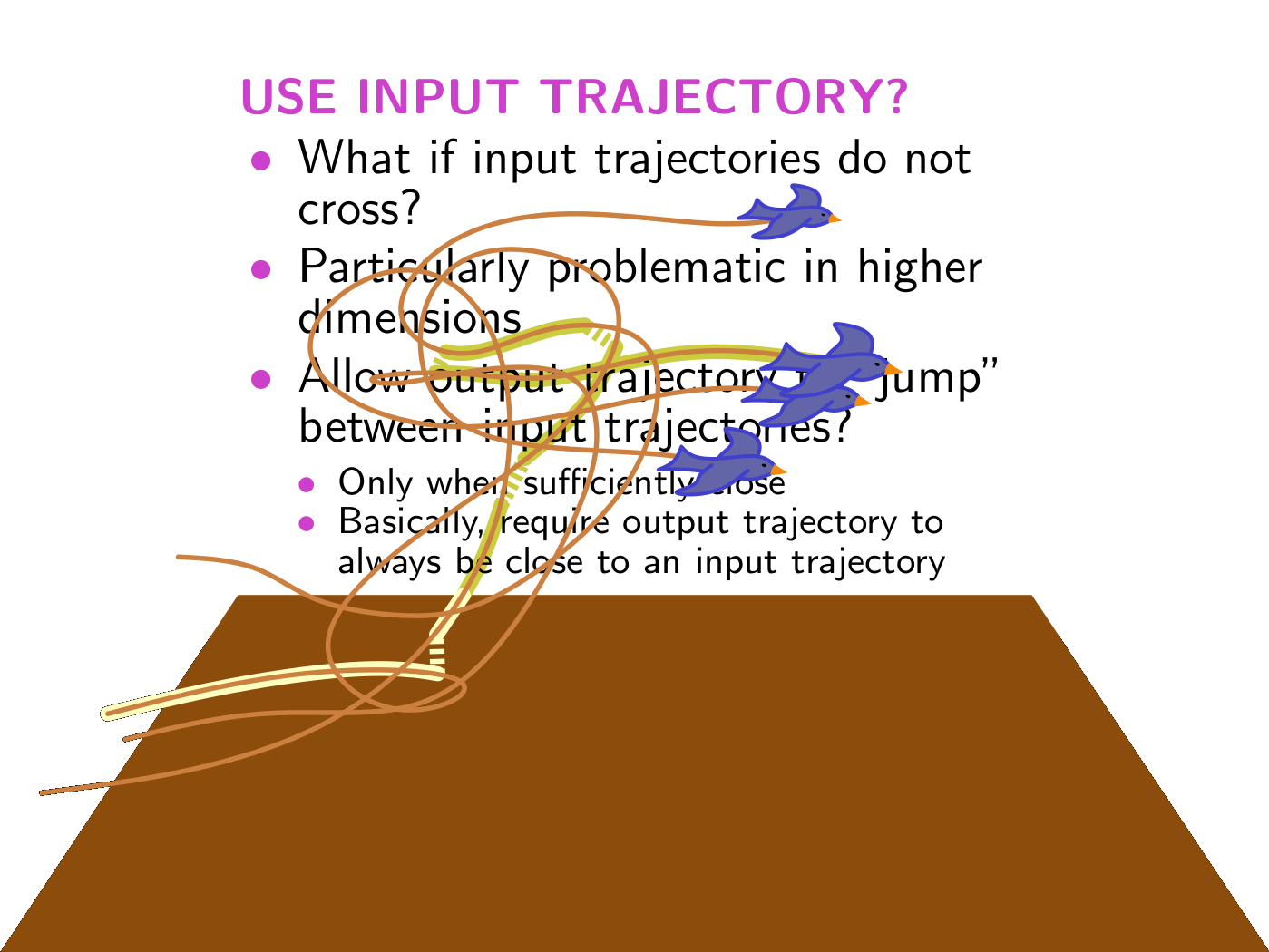
An important task in trajectory analysis is defining a meaningful representative for a set of similar trajectories. How to formally define and find such a representative is a challenging problem. We propose and discuss two possible definitions. In both definitions we use only the geometry of the trajectories, that is, no temporal information is required, and measure the quality of the representative using the homotopy area between the representative and the input trajectories. Computing an optimal representative turns out to be NP-hard for one of the definitions, whereas the other definition allows efficient algorithms for a reasonable class of input trajectories.