Abstract
Modern virtual environments can contain a variety of characters and traversable regions. Each character may have different preferences for the traversable region types. Pedestrians may prefer to walk on sidewalks, but they may occasionally need to traverse roads and dirt paths. By contrast, wild animals might try to stay in forest areas, but they are able to leave their protective environment when necessary.
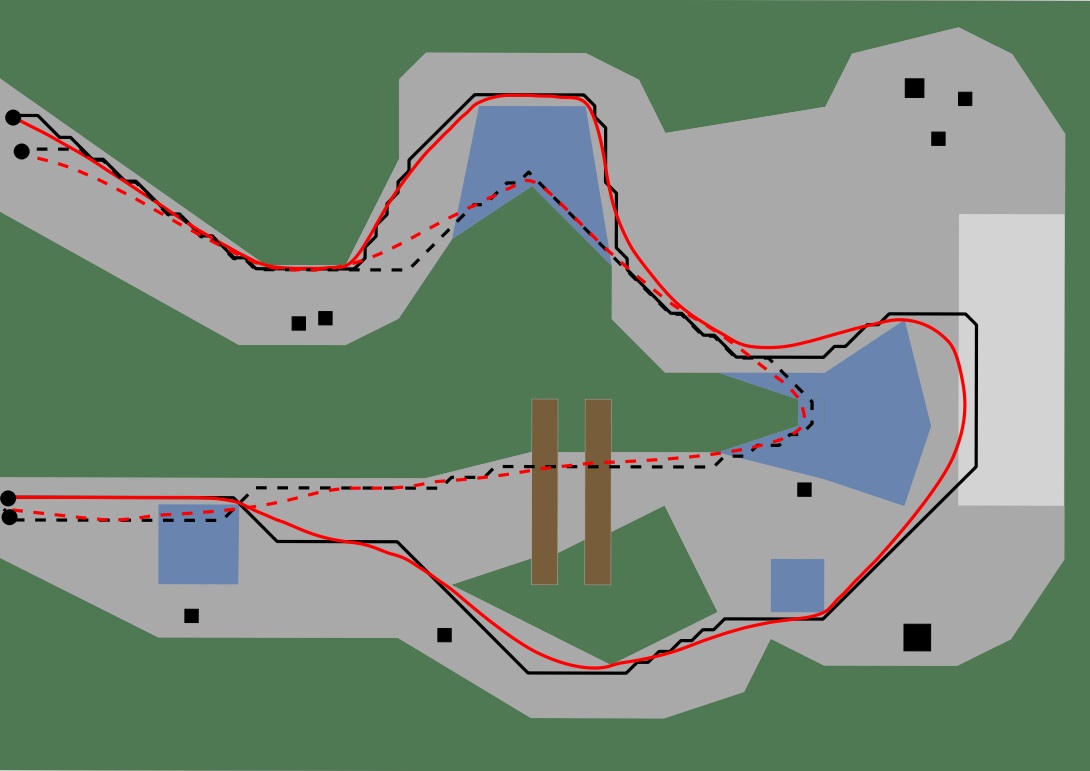
This paper presents a novel path planning method named MIRAN (Modified Indicative Routes and Navigation) that takes a character's region preferences into account. Given an indicative route as a rough estimation of a character's preferred route, MIRAN efficiently computes a visually convincing path that is smooth, keeps clearance from obstacles, avoids unnecessary detours, and allows local changes to avoid other characters. To the best of our knowledge, MIRAN is the first path planning method that supports the above features while using an exact representation of the navigable space.
Experiments show that with our approach a wide range of different character behaviors can be simulated. It also overcomes problems that occur in previous path planning methods. The resulting paths are well-suited for real-time simulations and gaming applications.
References
-
Norman S. Jaklin, Atlas F. Cook IV and Roland Geraerts. Real-Time Path Planning in Heterogeneous Environments. Computer Animation and Virtual Worlds (CAVW), 24(3):285-295, 2013.



-
Norman S. Jaklin, Atlas F. Cook IV and Roland Geraerts. Stay off the lawn! Creating smooth paths based on region preferences. ICT.OPEN 2013 (ICT.OPEN 2013).