Research overview
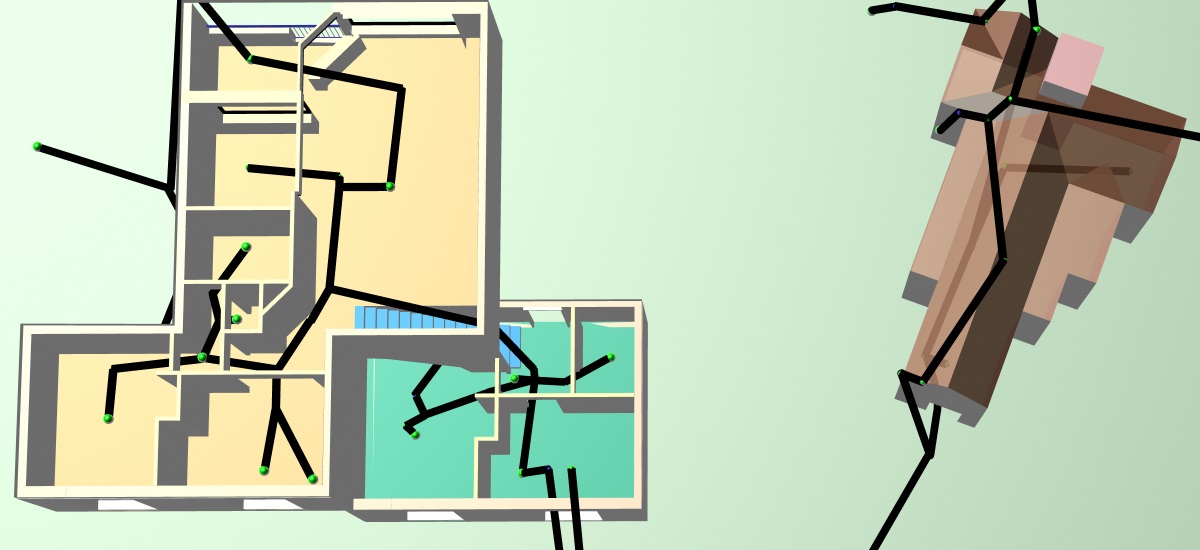
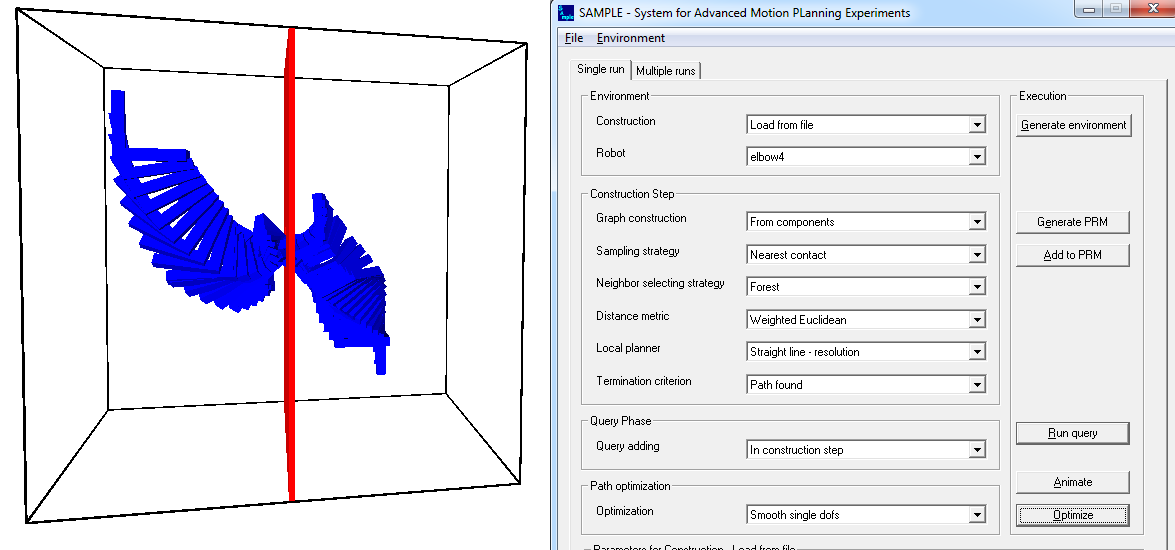
One of the fundamental tasks robots have to perform is planning their motions while avoiding collisions with obstacles in the environment. This is the central topic of the thesis. We restrict ourselves to motion planning for two- and three-dimensional rigid bodies and articulated robots moving in static and known virtual environments.
Welcome on my home page on crowd simulation and motion planning
Dr. Roland Geraerts | Associate Professor | Program Director Bachelor Computer Science | Information and Computing Sciences | Utrecht University | Princetonplein 5, room 4.08 | 3508 TB Utrecht | r.j.geraerts@uu.nl | www.uu.nl/staff/RJGeraerts
Our department page describes how you can visit us.