List of publications
Creating Small Roadmaps for Solving Motion Planning Problems.

One of the fundamental tasks robots have to perform is planning their motions while avoiding collisions with obstacles in the environment. This is the central topic of the thesis. We restrict ourselves to motion planning for two- and three-dimensional rigid bodies and articulated robots moving in static and known virtual environments.
The thesis deals with comparing and analyzing sampling-based motion planning techniques, in particular variants of the Probabilistic Roadmap Method (PRM). In addition, quality aspects of paths and roadmaps are investigated.

Roland Geraerts. Sampling-based Motion Planning: Analysis and Path Quality. Ph.D. thesis. Utrecht University. 2006.
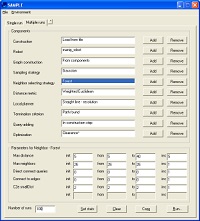
We conduct a comparative study of different techniques that are used in the Probabilistic Roadmap Method. In addition, we give a reachability analysis for sampling based planners which leads to a better understanding of the success of the planners.

Roland Geraerts and Mark H. Overmars. Reachability-based Analysis for Probabilistic Roadmap Planners. Robotics and Autonomous Systems (RAS), 55:824-836, 2007.
Roland Geraerts and Mark H. Overmars. Reachability Analysis of Sampling Based Planners. In IEEE International Conference on Robotics and Automation (ICRA'05), pp. 406-412, 2005
Roland Geraerts and Mark H. Overmars. Sampling and Node Adding in Probabilistic Roadmap Planners. Robotics and Autonomous Systems (RAS), 54:165-173, 2006.

Roland Geraerts and Mark H. Overmars. Sampling Techniques for Probabilistic Roadmap Planners. In Conference on Intelligent Autonomous Systems (IAS-8), pp. 600-609, 2004.
Roland Geraerts and Mark H. Overmars. A Comparative Study of Probabilistic Roadmap Planners. In Proc. Workshop on the Algorithmic Foundations of Robotics (WAFR'02), pp. 43-57, 2002.
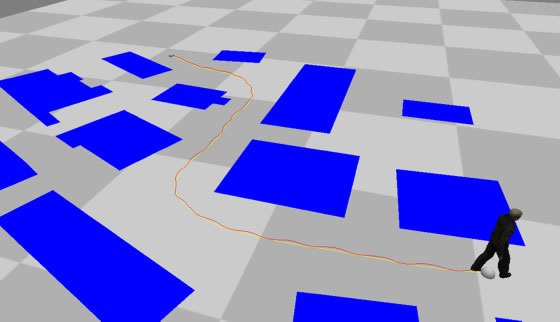
We present algorithms that increase the quality of a path. That is, we focus on decreasing the path length and increasing the clearance along a path. The techniques can be applied to a broad range of robots which may reside in arbitrary high-dimensional configuration spaces.
Roland Geraerts and Mark H. Overmars. Creating High-Quality Paths for Motion Planning. International Journal of Robotics Research (IJRR), 26:845-863, 2007.
Roland Geraerts and Mark H. Overmars. On Improving the Clearance for Robots in High-Dimensional Configuration Spaces. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'05), pp. 4074-4079, 2005.
Roland Geraerts and Mark H. Overmars. Clearance Based Path Optimization for Motion Planning. In IEEE International Conference on Robotics and Automation (ICRA'04), pp. 2386-2392, 2004.
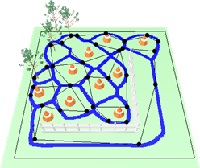
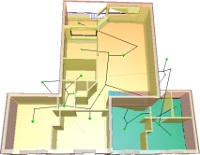
The Reachability Roadmap Method is a new and efficient algorithm that creates small roadmaps for two- and three-dimensional problems. The algorithm ensures that a path can always be found if one exists. We extend the algorithm such that short paths and high-clearance paths can be extracted from the roadmap in real-time.
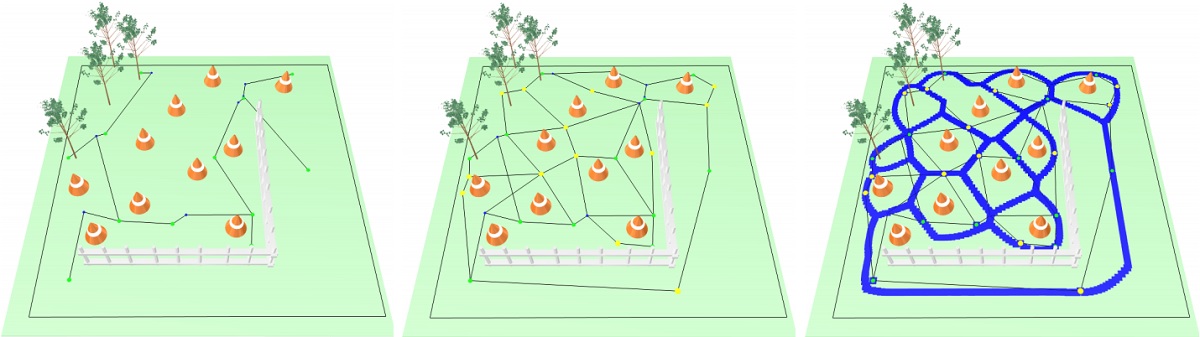
Roland Geraerts and Mark H. Overmars. Creating High-quality Roadmaps for Motion Planning in Virtual Environments. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'06), pp. 4355-4361, 2006.
Roland Geraerts and Mark H. Overmars. Creating Small Graphs for Solving Motion Planning Problems. In IEEE International Conference on Methods and Models in Automation and Robotics (MMAR'05) , pp. 531-536, 2005.
In robotics research, it is often difficult to compare and evaluate techniques experimentally. We identify these difficulties and provides solutions based on our work during the last four years in the field of sampling-based motion planning.
Roland Geraerts. On Experimental Research in Sampling-based Motion Planning. In (IROS'06) Workshop on Benchmarks in Robotics Research , pp. 31-34, 2006.
We study techniques for combining path planning with motion synthesis.
Ben J.H. van Basten, Arjan Egges and Roland Geraerts. Combining Path Planners and Motion Graphs. Computer Animation and Virtual Worlds (CAVW), 22(1):59-78, 2011.

Roland Geraerts and Mark H. Overmars. On the Analysis and Success of Sampling Based Motion Planning. In Conference of the Advanced School for Computing and Imaging (ASCI'05), pp. 313-319, 2005.
On Improving the Path Quality for Motion Planning. In Conference of the Advanced School for Computing and Imaging (ASCI'04), pp. 211-217, 2004.
My papers on crowd simulation can be found here.
Welcome on my home page on crowd simulation and motion planning
Dr. Roland Geraerts | Associate Professor | Program Director Bachelor Computer Science | Information and Computing Sciences | Utrecht University | Princetonplein 5, room 4.08 | 3508 TB Utrecht | r.j.geraerts@uu.nl | www.uu.nl/staff/RJGeraerts
Our department page describes how you can visit us.