Abstract
Our goal is to create roadmaps that are particularly suited for motion planning in virtual environments. We use our Reachability Roadmap Method to compute an initial, resolution complete roadmap. In addition, this roadmap is small which keeps query times and memory consumption low. However, for use in virtual environments, there are additional criteria that must be satisfied. In particular, we require that the roadmap contains useful cycles. These provide short paths and alternative routes which allow for variation in the routes a moving object can take. We will show how to incorporate such cycles. In addition, we provide high-clearance paths by retracting the edges of the roadmap to the medial axis. Since all operations are performed in a preprocessing phase, high-quality paths can be extracted in real-time as is required in interactive applications.
References
-
Roland Geraerts and Mark H. Overmars. Creating High-quality Roadmaps for Motion Planning in Virtual Environments. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'06), pp. 4355-4361, 2006.


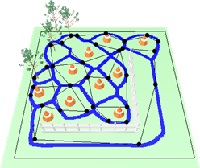
Some results