Abstract
In the last fifteen years, sampling-based planners like the Probabilistic Roadmap Method (PRM) have proved to be successful in solving complex motion planning problems. While theoretically, the complexity of the motion planning problem is exponential in the number of degrees of freedom, sampling-based planners can successfully handle this curse of dimensionality in practice. We give a reachability-based analysis for these planners which leads to a better understanding of the success of the approach. This analysis compares the techniques based on coverage and connectivity of the free configuration space. The experiments show, contrary to general belief, that the main challenge is not getting the free space covered but getting the nodes connected, especially when the problems get more complicated, e.g. when a narrow passage is present. By using this knowledge, we can tackle the narrow passage problem by incorporating a refined neighbor selection strategy, a hybrid sampling strategy, and a more powerful local planner, leading to a considerable speed-up.
References
-
Roland Geraerts and Mark H. Overmars. Reachability-based Analysis for Probabilistic Roadmap Planners. Robotics and Autonomous Systems (RAS), 55:824-836, 2007.

-
Roland Geraerts and Mark H. Overmars. Reachability Analysis of Sampling Based Planners In IEEE International Conference on Robotics and Automation (ICRA'05), pp. 406-412, 2005

-
Roland Geraerts and Mark H.Overmars. On the Analysis and Success of Sampling Based Motion Planning. In Conference of the Advanced School for Computing and Imaging (ASCI'05), pp. 313-319, 2005.

Examples

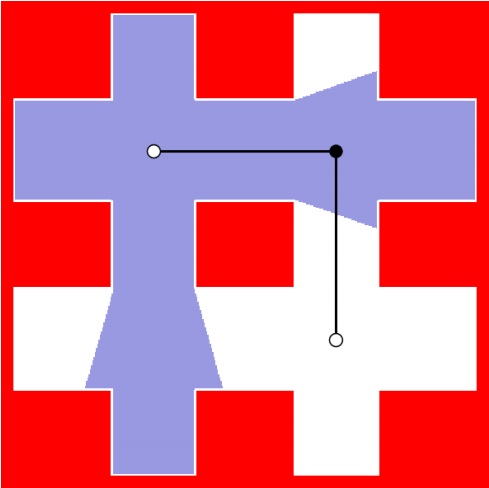
A 2D star-shaped reachability region, and a 3D reachability region for a manipulator arm with 3 DOFs.
Using a more powerful local planner results in a larger reachability region.

Straight-line and Potential field local planner.
The potential field local planner is also able to 'find' the entry of a narrow passage which eases making connections through the passage: