Abstract
A relatively new area within the field of path planning deals with computing a stealthy path for a character moving in a virtual environment. Besides efficiently obtaining a path that is collision-free, short and smooth, the added difficulty is that the path must have little or no exposure to observers. We propose a new algorithm for computing such a path in the plane, and show that real-time performance can be achieved.
Reference
-
Roland Geraerts and Erik Schager. Stealth-Based Path Planning using Corridor Maps. In Computer Animation and Social Agents (CASA'10), 2010.


Method
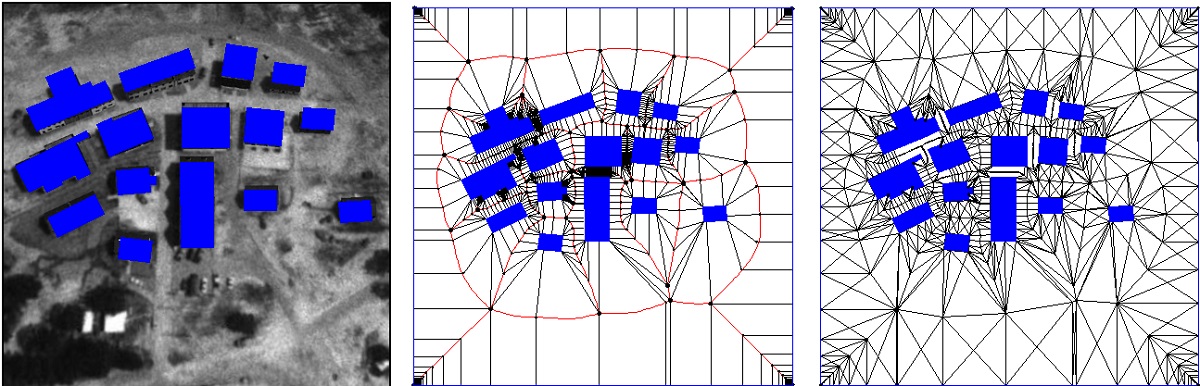
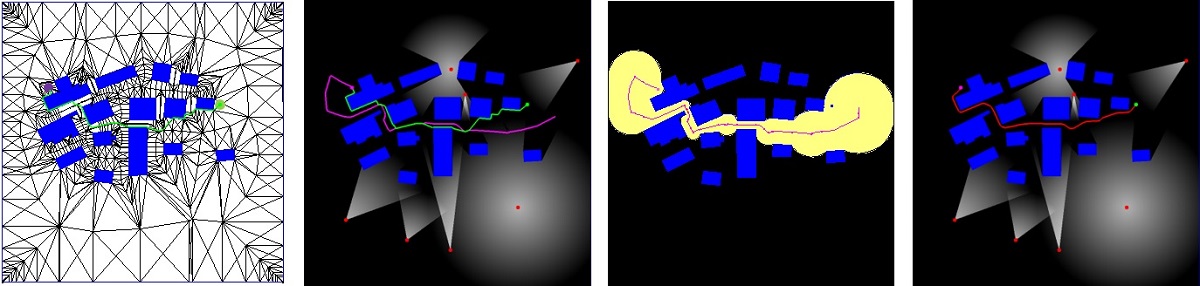
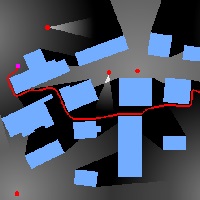
Our method computes a (CMPlus) graph that is used for global navigation, resulting in low CPU-load. A global route (in this graph) is extracted by the A*-algorithm. Its costs are given by sampled edges with visibility values. Visibility is computed at interactive rates by using the GPU. Next, the final path is computed by the Indicative Route Method which uses the global route as input. This method makes sure the resulting path is smooth while keeping a desired amount of minimum clearance to the obstacles. The method is fast enough for real-time performance.